Hextube Information System – Die mobile Heimüberwachung
Schule: IT-HTL Ybbs an der Donau
Klasse: 5AHITM, 5AHITN
Betreuung: DI Stefan Zauner, Mag. Sandra Handlgruber
Team: Tobias Schnetzinger, Marvin Kleinlehner, Rene Derfler, Lukas Gratzer, Felix Größbacher, Florian Pfeiffer

Beschreibung:
Das Ziel des Projektes ist es, einen fahrenden Überwachungsroboter zu entwickeln, der mit einer Kamera ausgestattet. Er kann somit ein ganzes Stockwerk sichern. Gesteuert wird das Gerät mithilfe einer Webapp im Browser. Dadurch ist die Steuerung plattformunabhängig. Zudem wird die Technologie einer progressiven Webapp eingesetzt, um sie lokal auf das Endgerät herunterzuladen.
Mithilfe einer sicheren VPN-Verbindung ist es auch möglich, den Roboter außerhalb des lokalen Netzes über das Internet zu erreichen. Der Roboter schickt einen Videostream und Sensordaten in Echtzeit an die Basisstation, die diese an die Website weiterleitet.
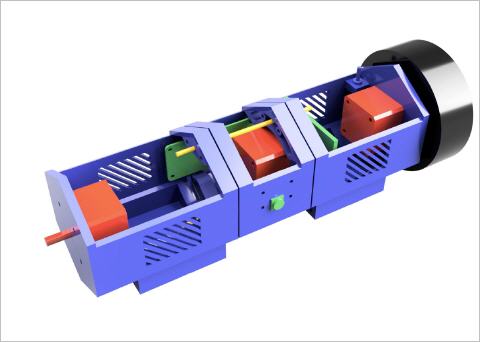
Dort werden die Daten visualisiert. Die Platinen, die die Spannungsversorgung und die Ansteuerung der Schrittmotoren realisieren, sind vollständig selbst entwickelt und bestückt worden. 8 AA-Batterien versorgen die Elektronik mit der benötigten Spannung. Das Gehäuse des Roboters setzt sich aus 3 Segmenten zusammen, wobei das mittlere neigbar ist, um der Kamera einen größeren Blickwinkel zu erlauben.
Dazu wird das Gehäuse vollständig selbst konstruiert und 3D-gedruckt. Zusätzlich soll eine Marketingstrategie verfolgt werden, die aus einem speziell gefertigten Imagevideo besteht, das auf unserer öffentlichen Website zur Verfügung gestellt wird. Dort sollen weiters die 3D-Modelle, Konzepte und Pläne zum Nachbau veröffentlicht werden.